
PAGE CONTENTS
Objectives
The objective of this project is to develop a flexible scalable navigation and sensor platform for NewSpace applications and SmallSat constellations. The combination of programmable hardware and powerful processors enables the integration of a variety of attitude and orbit control sensors in a single unit. Within the Technology Phase (part of the present activity) a GNSS Receiver Module EM is designed and tested as first instantiation of the platform. The so called NavRIX PinPoint is a spaceborne multi-frequency GNSS receiver for NewSpace applications capable of processing multi-frequency navigation signals of multiple satellite constellations. The migration of receiver software established for Beyond Gravity’s high-reliability receivers ensures robust operation and high-performance navigation with a short time to market.
Challenges
GNSS receivers are essential for many space missions. Nevertheless, the market expects low prices and low size, weight and power figures. Traditional GNSS receivers as for example Beyond Gravity’s high-reliability PODRIX are not competitive on a market oriented on the NewSpace paradigm, instead a receiver utilising commercial off-the-shelf (COTS) components is needed. In order to be successful in this highly competitive market, a GNSS receiver supplier must not develop individual receiver implementations for each customer or mission but has to offer a versatile product platform which can easily be adapted to customer needs.
System Architecture
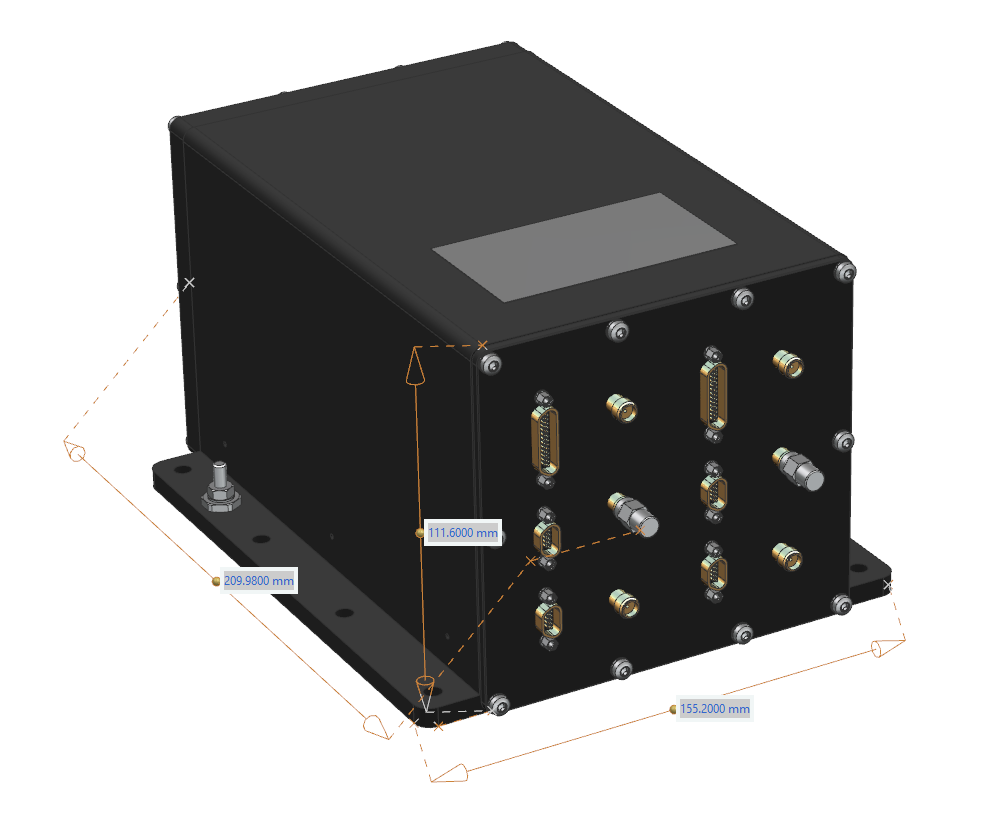
The NavRIX PinPoint comprises two types of boards: a GNSS processor module and a DC/DC converter and interface module. The mechanical concept can realise non-redundant and fully redundant configurations in one box. Several interfaces allow for future integration of other AOCS sensors.
The baseline telecommand and telemetry (TC/TM) interface is UART. The receiver software implements a CCSDS protocol inherited from Beyond Gravity high-reliability GNSS receiver generations.
The digital processing is implemented in a reprogrammable FPGA. This enables future enhancement of GNSS signal processing on the same hardware platform.
Plan
The project has following milestones:
– SRR
– PDR
– TRB 1
– TRB 2
– FR
The objectives of the SRR are:
– Present design and development process
– Present system requirements
The objectives of the PDR are:
– Present a summary of the outcome of the development phase
– Present system design
– Present verification plan
The objectives of the TRB1 are:
– Present results of EM measurements of the Processor Module
The objectives of the TRB2/FR are:
– Propose an outline of future product development strategies.
– Present the test results.
– Confirm that all outputs and deliverables have been completed/delivered.
Current Status
-
SRR was held.
-
Design and development process presented.
-
System requirements defined.