

-
StatusOngoing
-
Status date2025-11-10
-
Activity Code6C.008
This project aims to develop a system that can identify the presence of all types of manned air traffic approaching the uplink beam hazard zone of an Optical Ground Station (OGS). In particular, the following tasks are covered by the project activities:
- Develop a demonstrator system to showcase the use or IR/Radar systems to detect manned aircraft and other airborne targets.
- Develop a proposal for an aircraft detection system certification process.
The requirements of the final system are to continuously monitor (24h per day, 365 days per year) under both daytime and nighttime conditions, whenever optical communication activities are performed. When an object is detected approaching the hazard zone, the system shall automatically switch off the optical uplink and only resume operations once the object has left the hazard zone.
The system is required to demonstrate reliable detection up to a distance where the laser illumination is considered safe by the applicable laser safety regulations.
This project focuses on the development of a detection system that can protect aircraft near laser ground stations used for satellite communications. Due to the fact laser transmissions can dazzle pilots, the system’s core function is to issue laser termination commands whenever manned aircraft are detected within the region, ensuring safety. Meeting this goal requires tackling significant challenges: detecting fast, low-altitude aircraft, identifying targets at long distances, and achieving high detection performance while keeping false alarms low. The system must also maintain reliable operation under diverse environmental conditions, delivering consistent protection in all operational scenarios.
The proposed system is based around passive detection systems that can identify many types of targets, including aircraft that are not actively sending signals. Because it is passive, the system does not interfere with existing signals and can be used in different facilities without conflict.
The design encompasses two well established technologies which include infrared sensing and passive radar. Both are widely available on the market and are proven to be reliable. By combining them, the system can detect a wider range of targets more effectively. Using two different sensors also adds redundancy, making the system more versatile, reliable, and robust. This increases the chance of detecting targets in different conditions, which is especially important for keeping the airspace safe near laser ground stations.
The project also includes the definition of a certification process that follows European aviation standards. This certification process can be used to help pave the way for standardised, similar safety systems in the future.
At present, there seems to be no direct competition in the specific field of laser safety systems for aircraft detection, giving this project a strong opportunity to lead the market.
The system is designed primarily to detect manned aircraft, while also identifying other aerial targets such as drones, birds, and weather balloons as a secondary objective. It aims to provide coverage from just a few tens of metres up to 80 kilometres, with consistent detection and false alarm performance regardless of time of day or adverse weather conditions.
At its core, the product integrates two complementary technologies, infrared sensing and passive radar. This combination extends the system’s operational limits, including maximum range, minimum elevation angle, smallest detectable target, maximum velocity, and overall reaction time. By utilising the strengths of both sensor types, the system ensures comprehensive coverage and resilience, even in challenging scenarios.
Alongside the hardware, bespoke software – developed as part of this project – is integrated into each sensor system. This software processes incoming data, enabling autonomous aircraft detection and the automatic transmission of termination commands to the ground station’s laser unit. As a result, the system can autonomously detect targets with diverse behaviours allowing timely and accurate decision making. The integrated approach maximises safety while maintaining efficiency, offering a robust solution for protecting manned aircraft and addressing additional airborne hazards near laser ground stations.
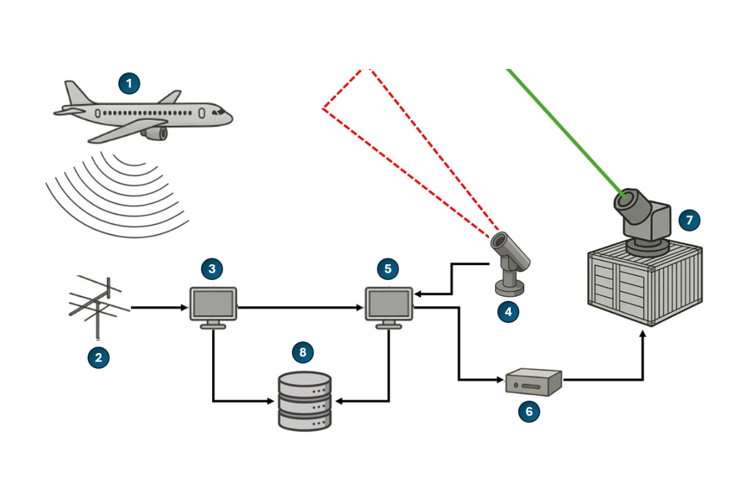
Aircraft Detection System Architecture Components:
- [1] – Aircraft Approaching Laser Transmission Beam
- [2] – Passive Radar Antenna
- [3] – Passive Radar Data Processing Machine
- [4] – Mid Wave Infra-Red Sensor
- [5] – Infra-Red Data Processing Machine
- [6] – Laser Safety Unit
- [7] – Laser Transmission Unit
- [8] – Database
The aircraft detection system consists of two complementary subsystems - infrared and passive radar - both interfacing with the ground station. Each subsystem applies its own observation strategy and data processing pipeline, recording detection events with relevant information in a database. At the system level, an interface with the ground station retrieves laser status and issues automated commands to temporarily suspend laser operations when necessary.
The Infrared subsystem uses a mid-wave infrared camera mounted on a pan–tilt unit, controlled by a dedicated PC. This control server also manages communication with the ground station and database. Video feeds are processed using various detection algorithms to detect airborne targets. The pipeline outputs termination decisions that the control PC transmits to the laser switch.
The Passive Radar subsystem leverages existing DVB-T broadcast signals for detection. It comprises two antennae (reference and surveillance), band-pass filters, low-noise amplifiers, and a software-defined radio. This subsystem enables detection at extended ranges, up to 80 km depending on signal availability and target radar cross-section (RCS).
Together, these subsystems provide complementary coverage, ensuring timely detection across a wide range of scenarios and reliable protection for aircraft near laser ground stations.
The project began with a review of state-of-the-art technologies and detection algorithms, followed by a quantitative trade-off to identify the most suitable solutions. Based on this, technical specifications were defined and a baseline for the IR and passive radar subsystems established. The next phase focuses on detailed design, alongside the definition of implementation and verification plans. System performance will then be assessed through dedicated test campaigns. Finally, the project concludes with a development roadmap outlining future improvements and follow-on activities to enhance system capability.
The activity kicked off in January 2024 and reached MS1 in November 2024. Work is ongoing, with subsystems, components, and interfaces being fully defined. Hardware has been selected and procurement is underway. In parallel, an Implementation and Verification Plan has been established to ensure thorough testing against system-level requirements. This phase lays the foundation for integration and validation, securing compliance while preparing the system for subsequent development and testing activities.
