
PAGE CONTENTS
Objectives
The main objective of AUTOCA is the development of autonomous collision avoidance mechanisms, consisting of approach and software, for NGSO constellations during routine operations and for satellites’ operations during electric orbit raising or lowering. Therefore, AUTOCA allows a considerable reduction of the operational load associated to collision avoidance operations.
In addition, AUTOCA aims to enable key technology developments for autonomous COLA operations not available today. Moreover, the objective includes reducing operation load and increase the safety of operations in order to preserve the space environment.
Challenges
AUTOCA faces several challenges. The biggest challenge is represented by the lack of historical data in relation to COLA. The number of close encounters is increasing. However, the available data, in form of CDMs, consists of many uneventful conjunctions. Only a small fraction of close encounters lead to a manoeuvre being executed. Moreover, the decision took for each conjunction can vary, depending on the operator. Thus, an inconsistency in historical decisions must be taken into account.
In the case of impulsive propulsion, data is more prevalent compared with electric propulsion scenario. This added lack of data for electric propulsion is the second highest challenge.
System Architecture
AUTOCA is designed as modular. Each part of the project is to be designed as separate component to a high degree in order to facilitate integrating the building blocks in other software environments.
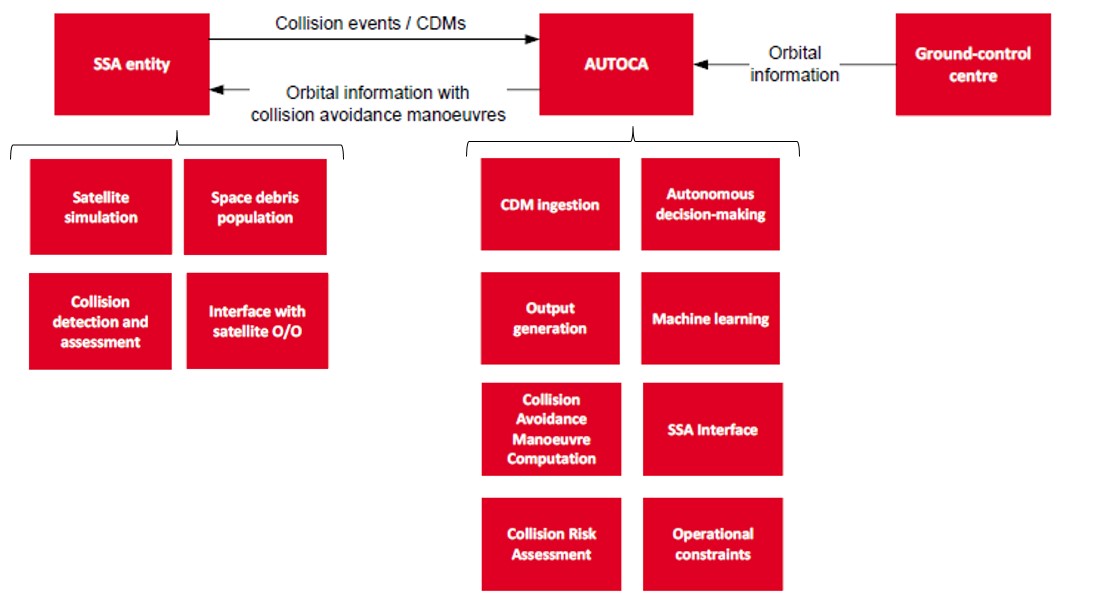
The following high-level components have been identified in the software:
- CDM ingestion component, in charge of ingesting into the software the CDMs to be analysed.
- Autonomous decision-making component, in charge of taking the decision about the need for a manoeuvre or not autonomously
- Collision avoidance computation component, in charge of computing the collision avoidance manoeuvre more adequate to the mission and its operational constraints
- Collision risk assessment component
- SSA entity interface component, in charge of interacting with the SSA entity for the provision of orbital data (i.e. in OEM format) for its analysis, including as well, planned manoeuvres for station-keeping or even collision avoidance manoeuvres for evaluation
- Machine learning component, in charge of ingesting the information from past CDMs and manoeuvre decisions in order to train the core software for autonomous decision-making.
Plan
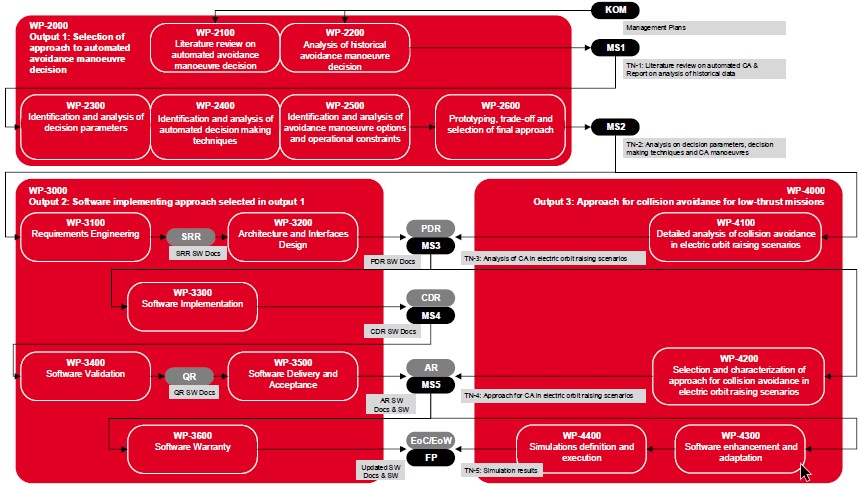
The project spans over a period of 24 months, with the activities divided into three main phases:
- Phase 1: Literature review, analysis of existing and new approaches for autonomous COLA and selection of the most promising approach, based on the analysis, comparison and prototyping of the different approaches. Focused on NGSO constellations during routine operations, using chemical or electric propulsion.
- Phase 2: Implementation of the selected approach in an autonomous collision avoidance software and validation of the software in a test bed simulating all involved actors in the field of collision avoidance (SSA entities, GCS, stations, spacecraft).
- Phase 3: Extension of the autonomous collision avoidance approach and software to the case of electric orbit raising or lowering, given the fact that these activities involve long period of operation of the propulsion system of the satellite.
Main phases, work packages and milestones are described in the image below:
Current Status
The project is currently at the end of the first phase of the Study/Prototyping stage. A first assessment of the different machine learning algorithms suitable to be applied for the autonomous COLA has been delivered for the first Milestone of the project. The next activities to start involve a more in-depth analysis on the algorithms, a selection of the most promising approaches, and their prototyping.