

PAGE CONTENTS
Objectives
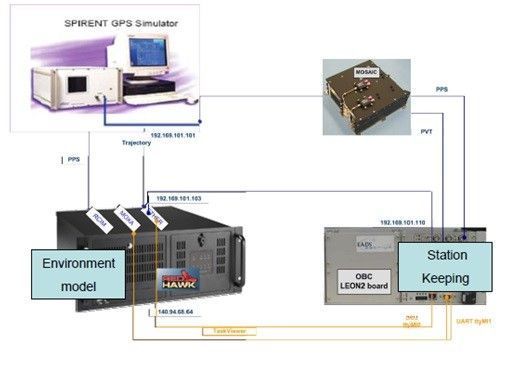
Trade-off on different autonomous orbit-determination solutions including GNSS and optical-based navigation, and a trade-off on different station keeping strategies, to define the global autonomous system best suited for chemical and for hybrid chemical/electrical Telecom platforms on geo-stationary orbit. The chosen solution is based on GNSS and on classical Station Keeping strategy. Performances are assessed on a closed-loop functional software simulator, and on a closed loop real-time test bench including a MOSAIC® GNSS receiver, a LEON2 on-board computer, a SPIRENT GNSS stimulator, and a REDHAWK PC.
The objective of this activity is to develop and evaluate the performances of on-board algorithms for the planning and execution of station keeping manoeuvres on geo-stationary orbit for fully chemical and for hybrid chemical / electrical telecommunication platforms, using autonomous orbit determination based on optical navigation or on GNSS. It is a natural follow-on to two previous ESA studies: “Feasibility of GNSS sensors for AOCS Applications in GEO and Higher Altitudes” and “GEO Orbit Determination Using an APS-Based Navigation Sensor”.
Benefits
Features
- The navigation system: either MOSAIC or LION GNSS receiver
- The on-board computer implementing the station keeping manoeuvres computation and execution
- a MOSAIC GNSS receiver
- a LEON2 on-board computer
- a REDHAWK real-time linux PC
- a SPIRENT GNSS stimulator
Challenges
The chosen Station keeping strategy is similar to the one currently performed on ground because it offers a good ephemeris and manoeuvers prediction for at least the upcoming week, it has no overconsumption, and is well mastered by the operators.
Plan
Current Status
Additional tests performed has shown the sensitivity of SK performances to the radial position error which could be reduced by further optimizing the GNSS receiver filter.

