
PAGE CONTENTS
Objectives
At satellite level level, the main interest is to offer flexibility to satellite operators in the following cases:
Satellite co-location
The evolution of the satellite fleet inside the same orbital position can lead to Telemetry, Command and Ranging (TCR) frequency coordination difficulties. The implementation of TCR sub-systems with command frequency flexibility capability can ease the coordination process.
Satellite re-location
The change of orbital position can also lead to coordination difficulties for TCR frequencies. The possibility to change them is, in that case, a strong advantage.
Jammer avoidance
During LEOP phases (especially for Electric Orbit Raising – EOR), spread spectrum demodulation mode or frequency flexibility capability allows to select another operating frequency far enough from the jammed one.
Unachieved frequency coordination at program kick-off
Unachieved internal satellite frequency coordination with COM bandwidth at program kick off.
Due to market developments, there was a need to migrate to the CAN Bus platform interface. Therefore, the development of an advanced command receiver with all the features needed for EOR with the CAN Bus interface was mandatory to address the GEO Satcom market for the coming years.
Benefits
The command receiver can be implemented on platforms of different satellite primes without the need for adaptations because of the CAN bus interface.
Features
The CAN Bus Interface function is summarized hereafter:
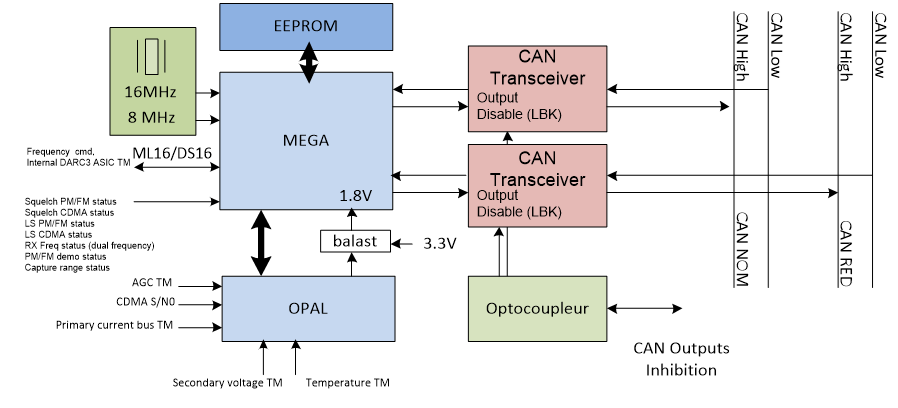
The CAN Bus interface ensures the interface between the payload interface unit, via a redundant bus, and the receiver internal TM/TC.
The CAN bus interface is based on an ASIC named MEGA developed by TAS-F and dedicated to the interface between onboard units and satellite TM/TC bus.
This digital ASIC shall be used coupled with a EEPROM where its configuration is stored.
The analog telemetries are processed by the OPAL ASIC developed by TAS. These TMs are then made available through the CAN bus interface.
Challenges
The challenge of the project was to design, to manufacture and to qualify the Interface board hosting the function able to
-
Adapt the Ranging and Command Data interface to the dedicated format required by the platform.
-
Gather the receiver telemetries and convert them through the CAN Bus interface.
-
Convert the receiver frequency command & telemetries from the CAN bus to the ML16/DS16 format.
Furthermore, the Qualification of this Interface board had to be compatible with the schedule needs of the satellite operator.
System Architecture
–
Plan
The main steps of development plan of the CAN Bus Interface Board:
-
Definition of the command and telemetry protocol for the CAN Bus
-
Detailed design of the Interface board
-
Manufacturing of an EM Interface board
-
Update of the Automatic test bench for CAN Bus protocol
-
Validation of the CAN Bus automatic test bench combined with the EM Interface Board electrical validation.
-
EQM manufacturing
-
PFM Manufacturing
-
Qualification of EQM and PFM
Current Status
The Konnect CAN Bus Flexible Command Receiver is in orbit and fully operational since early 2020. The CAN Bus Flexible Command Receiver is the standard unit CMR for the TAS SpaceBus NEO platform and tens of units have been manufactured so far.
