

PAGE CONTENTS
Objectives
The solutions that exist today with all telecom primes are not fully supported by a standard. Aim of the study is to propose a solution supported by an existing standard well known and well distributed in other industries. The main objectives are
- To define in detail a CAN bus solution compatible with satcom environments and requirements,
- To insure low time to market through efficient CAN/CANopen IP availability and prepare for future enhanced industrial competitiveness based on CANopen,
- To validate CAN to enable commercial CAN bid for satcoms at study completion.
Benefits
The benefits brought by CAN cover several domains:
Harness: payload harness definition and manufacturing are on the critical path of the satellite schedule. The proposed solution minimizes the harness constraints in terms of number of connection points, cable type and manufacturing operations (shielding).
Data rate: 1Mb/s data rate is now common for data bus, this is much more than the current LSSB data rate and the increase of that performance has many benefits in terms of data sampling latency and time stamping aspects. RF performance testing will take benefits of such data rate when several thousands of measurements are done during satellite test campaign.
Large Addressing capability: allows straightforward implementation for mid complexity terminals having memory, it simplifies also data management at system level.
Flexibility: payload’s needs evolve either as a continuous trend: growing number of tubes on bent pipe payloads, growing pressure on satellite’s AIT schedule or to cope with particular demand as payload processing or military missions that use mid-complexity units subscribing the payload serial bus. Compared to existing solutions, the CAN facilitates a larger flexibility and allow the management of more complex and versatile payloads
Features
The main characteristics of a single CAN bus are:
- Connected nodes: up to 64
- Maximum bus length: 40 meters
- Cable type: AWG28 unshielded
- Cold redundant buses with autonomous bus selection
The CAN bus gateway offers in addition to the LSSB features:
- 2 CAN buses using discrete interface
- 2 CAN buses using integrated CAN transceivers
Possibility to dedicate one bus for AIT activity
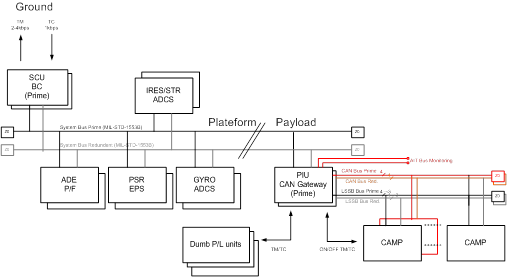
System Architecture
The architecture of the CAN Bus is based on a Master/Slave approach. All CAN exchanges are initiated by the CAN Bus Gateway. This approach simplifies the whole bus management and particularly time stamping aspects. As each node exchange is controlled by the CAN Bus Gateway, there is no possibility to overload the bus. The data produced by the nodes are acquired cyclically by the CAN bus Gateway and transferred on the system bus (Mil-STD 1553B). On the other hand, commands received from system bus are transferred on the CAN buses by the CAN Bus gateway.
Challenges
Shape the CAN to fulfil satcom requirements:
Challenge is to adapt the CAN bus protocol which has been developed by automotive industry to manage real time tasks fulfilling the needs of the Telecom payloads management.
Integrate CAN to the platform preserving gained heritage:
The proposed solution needs to build on the heritage and to cope with existing context. E3000 software and 1553B system bus management with their own capabilities that have to be taken into consideration.
Offer a high reliability level:
Mission availability is a key feature for telecom payloads, the data bus reliability that connects several RF units must cope with that requirement by implementing redundancy and solutions to avoid failure propagation.
Plan
The development logic is given by the figure below, it contains the following steps:
- Initial protocol discussion to compare the currently selected options for the different protocol layers to future needs, to other industrial or space applications, and to the evolving standardisation for spacecraft on board applications
- CAN bus gateway modification to embed 4 operational CAN buses.
- Physical layer analysis and test with RS-485 and CAN ISO transceivers
- Design and manufacturing by TESAT of a test unit with CAN TM/TC interface representative of future CAMPs/MPMs/FPMs
- An end-to-end validation test on Avionic Test Bench with E3000 On board software, on board computer, CAN bus gateway and the proposed test unit.

Current Status
Development is completed, a CAN bus solution is defined and has been validated through two main test campaigns both at physical layer and system level.
