
PAGE CONTENTS
Objectives
Neuromorphic computers are non-von Neumann computers whose structure and function are inspired by brains and are therefore composed of neurons and synapses. They have enormous potential for many different applications and have so far been little explored in the field of satellite communications.
In this context, the main objectives of the project were to:
-
Identify potential use cases and applications of Neuromorphic Processors for future SatCom Systems and provide a justification for the need of making use of this new computing architecture.
-
Compare the performance and implementation of the identified applications when run on standard processor solutions (i.e. GPU/CPUs/ FPGA/ AI-Accelerators, etc.) compared to neuromorphic processors.
-
Outline the design of a future Neuromorphic Processor Proof of Concept demonstrator for a viable SatCom application together with a corresponding development roadmap, timescale, and cost envelope.
To carry out these objectives the project has been divided into five work packages:
WP1: Technology Watch on Neuromorphic Processor. The aim is to perform a survey of the current state-of-the-art Neuromorphic Processor products and solution and assess their applicability to space applications.
WP2: SatCom Applications. This work package targets the identification of space applications that could benefit from implementation under the paradigm of Neuromorphic Processors.
WP3: Benchmark. The objective is to compare the performance and implementation of the identified SatCom applications when run on standard processor solutions compared to neuromorphic designs.
WP4: Prototype Design. This work package will outline the design of a future Proof of Concept demonstrator for a viable satcom application (suitable for realisation through a future ARTES activity).
WP5: Space Gaps. This work package is dedicated to the description of the necessary steps for a flight space mission to integrate the prototype design.
Benefits
There are several applications where the neuromorphic processors could be useful considering the learning capabilities of the spiking neural networks. The main fields where neural networks could be used, and the associated space applications, are the following:
-
Image recognition (Earth observation)
-
Multispectral & hyperspectral image processing (Earth observation)
-
Imaging radar (Synthetic Aperture Radar)
-
Inverse kinematics (Robotic arms)
-
Interference detection and correction (Satcom)
-
Signal processing (Satcom)
-
Beamforming (Satcom)
-
Network optimization and prediction (Satcom)
-
Expert systems (Satcom, Earth observation)
Neuro SatCom will evaluate the benefits of employing neuromorphic processors compared to von Neumann-based devices such as state-of-the-art space qualified COTS processors (MPSoCs, multicore processors, manycore processors, GPUs, etc.) and FPGAs. As applications could differ on several dimensions, the benefits the neuromorphic approach may differ from one type of application to another.
Features
Neuro SatCom has focused on the following use cases:
-
Interference detection. Interference management is crucial for satellite communication operators to maintain high-quality and reliable systems. Interference detection is a well-studied area, but the increasing diversity of wireless standards requires a more general approach. Researchers have proposed the use of AI techniques, specifically DNN Autoencoders, for interference detection at the receiver side. Autoencoders can detect known, and unknown interferences based on data patterns.
-
Congestion forecasting. Network traffic forecasting is important for many satellite applications, such as congestion control, dynamic routing, and network planning. Satellite network traffic is self-similar and demonstrates long-range dependence (LRD), which means that it is correlated over long periods of time. Traditional forecasting models for terrestrial networks are not suitable for satellites because they are not designed to handle LRD. ML techniques are a promising approach for accurate and efficient forecasting of satellite network traffic, as they are able to handle LRD and non-linear relationships in data and offer better performance.
-
Jamming classification. Satellite communication systems require reliability and security, including an anti-jamming capability to defend against jamming attacks that can disrupt throughput. Traditional anti-jamming techniques lack the ability to adapt to evolving jamming methods. AI-based algorithms provide advanced tools for intelligent jamming attacks, posing a serious threat to communication reliability. While there are various jamming management solutions, limited effort has been dedicated to jamming classification algorithms, which are crucial for effective interference management.
-
Precoding matrix computation. The use of precoding techniques can reduce inter-beam interference in satellite communication systems, improving the Signal-Noise-Interference- Ratio (SNIR). Machine learning, particularly deep learning, has been proposed for the efficient computation of precoders.
The Neuromorphic Processor to be used in Neuro SatCom for the implementation of the selected use cases was SpiNNaker (Spiking Neural Network Architecture) machines, brain-inspired massively parallel computing platforms.
Challenges
The main challenges of this project are:
-
The exploration and understanding of state-of-the-art Neuromorphic Processor hardware and software technologies and the assessment of their applicability to space applications.
-
The identification of space applications that could benefit from implementation under the paradigm of Neuromorphic Processors.
-
The specification of a proof-of-concept demonstrator targeting satcom applications run on Neuromorphic Processors.
System Architecture
The hardware platforms selected to perform the comparison between ANN-based and neuromorphic architectures are the following:
-
NP platform: Simulations of spiking neural networks were carried out using the SpiNNaker machine, a supercomputer designed for neural network simulation. The machine, located at the University of Manchester, UK, consists of a 2D mesh of interconnected chips. Information is encoded as multicast packets and routed through the network using patented hardware routers. The SpiNNaker chip, based on 130nm technology, has 18 ARM968 cores and 2GB of shared SDRAM. The design follows a Globally-Asynchronous-Locally-Synchronous (GALS) methodology to optimize power efficiency. The next-generation SpiNNaker2 device, developed by TU Dresden in collaboration with the University of Manchester, is used for power and performance comparisons. SpiNNaker2 is implemented on radiation tolerant 22nm FDSOI technology and offers improved performance and power efficiency compared to SpiNNaker1. The architecture of SpiNNaker2 is similar to SpiNNaker1, using patented router technology and external SDRAM. Mapping a neural network onto SpiNNaker2 is expected to operate similarly to SpiNNaker1 but with lower power consumption and higher performance thanks to state-of-the-art voltage and frequency scaling technology.
-
Non-NP platform: The project team used Xilinx’s VERSAL FPGA, specifically the Versal AI Core Series VCK190, as the non-neuromorphic hardware benchmark. This FPGA is based on the state-of-the-art Versal ACAP VC1902 device, which was evaluated for Single Event Latchup (SEL) and Single Event Upset (SEU) and found to have improved radiation tolerance compared to previous Xilinx devices. The space-grade XQR Versal family is targeted for onboard processing payload applications. By combining this hardware with Xilinx Vitis AI, a powerful software development stack for AI inference, AI models can be deployed on satellites without major architectural changes, ensuring high radiation tolerance. Vitis AI supports mainstream frameworks, provides pre-optimised models, includes a quantizer for model calibration and tuning, offers layer-by-layer analysis, and provides unified APIs for maximum portability. In addition, Xilinx offers customizable IP cores for efficient and scalable implementations in various applications.
Plan
Neuro SatCom was launched on May 5th, 2022 and finished on May 2023.
The key project outcomes were:
1. Survey on Neuromorphic Processors and Associated Platforms, Models, Software and Hardware for Space Applications. The main conclusions drawn by this study can be summarized by the following items:
-
Neuromorphic processors are expected to be much more energy-efficient than current solutions, while maintaining an accuracy level very close to ANNs.
-
The current state of the art is still far from this goal, but there are many indications that the promises of efficiency improvements will be met or even exceeded. In particular, the study identified three main contributing factors: the rapid evolution of neuromorphic architectures, the promising performance of novel SNN algorithms, and the development of emerging technologies and neuromorphic sensors that incorporate in-memory computing capabilities and are expected to provide a disruptive advantage when they reach technological maturity.
-
In the meantime, the use of COTS (commercial off-the-shelf) can be a suitable and temporary solution for the implementation of SNNs in space.
-
Hybrid architectures (employing both traditional CMOS and emerging technologies) are a promising solution that can partition applications and algorithms onto the portion of the device for which they are best suited to achieve performance gains.
2. Comparison between NP and non-NP Platforms. To compare the NP and non-NP platforms for the selected SatCom applications, we performed a series of experiments to measure hardware and algorithmic efficiency, targeting three hardware implementations for each case: the non-NP platform (Xilinx Versal), the NP platform (Spinnaker) running quantized ANNs, and the NP platform running SNNs. Network topologies were carefully respected and maintained, even when converting the ANNs to SNNs, to make the comparison as fair as possible.
Tables 1 and 2 show energy/power information grouped by use case (rows) and model type (columns). Table 3 shows the throughput (inferences per second) for each platform. For SpiNNaker, the supply rail voltage is 1.8V and the processor clock speed is 200MHz. A single time step of a neural network running on Spinnaker is 1ms or 200K clock cycles. Since each activation value can be transmitted using a maximum of three spikes, a new inference can be initiated every four cycles, with the fourth cycle acting as a reset pulse to separate presentations of the input patterns. In terms of accuracy, there were no significant differences between the experiments.
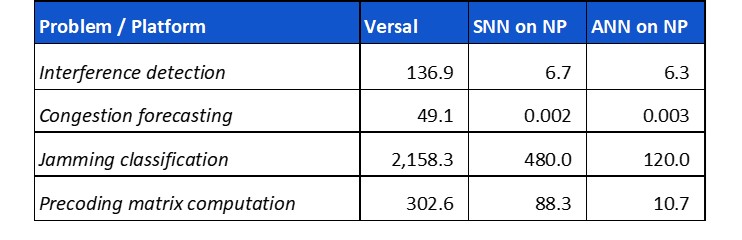
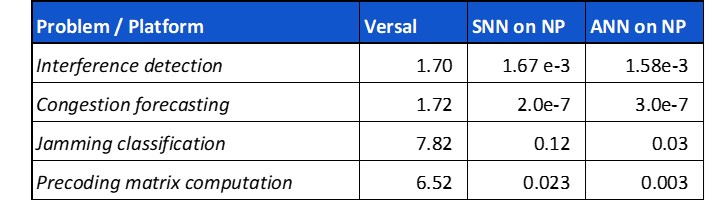
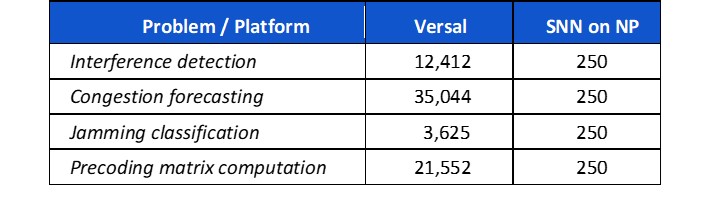
The comparison of NP and non-NP platforms for SatCom applications revealed several key findings. In terms of energy consumption per inference, the NP platform (specifically SpiNNaker) showed higher efficiency compared to the non-NP platform, but the advantage of using spiking neural networks (SNN) over traditional artificial neural networks (ANN) was not evident. Similar trends were observed for average power consumption, with the NP platform consuming less power overall. However, the non-NP platform exhibited faster throughput compared to SpiNNaker, albeit at a higher energy cost.
The experiments highlighted the following trends: the non-NP platforms were capable of implementing the target applications within the given power budgets, making them worth pursuing further development. For the NP platform, the quantized ANN model outperformed the rate-coded SNN in terms of energy efficiency. The quantized ANN model benefited from optimized memory accesses and specific algorithm tuning, which were not feasible in the event-driven SNN. The performance advantage of the ANN was attributed to its single multiple-accumulate operation and efficient weight fetching, as opposed to the multiple addition operations and frequent weight accesses in the SNN.
In conclusion, the quantized ANN model on the NP platform proved to be more energy-efficient for implementing the target networks compared to the rate-coded SNN. This finding does not rule out the possibility of developing a different type of spiking network that employs alternative encoding methods to leverage temporal information in spikes. However, such developments were beyond the scope of the conversion methodology employed in this project.
3. NP Platform Space-Grade Prototype Evaluation.
The evaluation of the SpiNNaker2 prototype revealed its potential capabilities and integration possibilities for satellite applications. Scalability is a fundamental principle of SpiNNaker2, allowing multiple chips to be connected in a seamless two-dimensional hexagonal grid, forming a system of arbitrary size. Multiple networks can be run simultaneously on the same SpiNNaker2 chip, and different processing types, such as spiking neural networks (SNNs) and deep neural networks (DNNs), can be utilized.
The radiation effects on SpiNNaker2 were also considered. The use of SpiNNaker2’s rate-coded SNNs with redundancy in the neural code can tolerate small errors caused by radiation without significant distortion. The implementation of SpiNNaker2 on radiation-resistant 22nm FDSOI technology provides better tolerance to total ionization dose (TID) and single-event effects (SEE). Radiation-induced errors are expected to primarily affect the memory, but the on-chip SRAM has built-in error correction capabilities, and an ECC variant can be used for the external SDRAM.
The distributed nature of memory and computation in SpiNNaker2 offers potential self-healing capabilities. Individual core or chip failures can be managed by allocating neurons to other functioning cores, and spike packet routing can be modified through the on-chip routing tables. The flexibility of the SpiNNaker2 architecture allows for self-repair and redundancy schemes, making it robust in the face of errors. Furthermore, as SpiNNaker2 runs a software simulation, the network’s functionality can be easily updated and reconfigured while in service.
Overall, the evaluation highlights the promising capabilities of SpiNNaker2 for satellite applications, including its energy efficiency, scalability, fault tolerance, and self-healing features. The SpiNNaker2 prototype presents a potential solution for onboard computing power in real-time, energy-sensitive environments, particularly for machine learning applications.
4. Recommendations
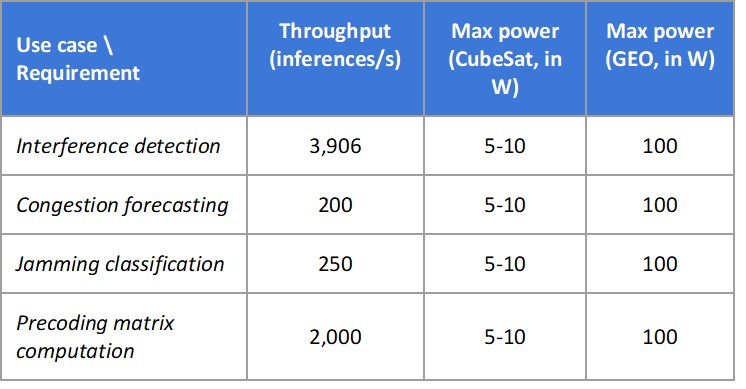
Two types of paradigmatic missions were considered for the recommendations: the Small Satellite / CubeSat mission class and the Geostationary (GEO) mission class. The small satellite mission is an In Orbit Demonstration (IOD) mission that serves as a proof of concept (PoC) in a CubeSat satellite. The Geostationary Mission Class is considered as an MVP (Minimum Viable Product) approach and can be implemented in a Mini-GEO platform or as a hosted payload. Table 4 summarises the throughput and power requirements identified for each mission and SatCom application.
The main recommendations of the project are as follows:
-
SpiNNaker is designed to be energy-efficient. It is well-suited for applications where throughput is not a critical factor, such as congestion prediction and jamming classification.
-
VERSAL provides higher throughput than SpiNNaker. It is a good choice for applications where more power can be allocated to achieve higher throughput, such as in GEO missions with a larger power margin. For interference detection and precoding, VERSAL is the best option.
-
Neuromorphic processors may not be an appropriate choice for energy-intensive GEO-class missions, as their main advantage lies in energy efficiency. However, for small CubeSats with limited power resources, neuromorphic processors such as SpiNNaker are the most suitable choice.
-
SpiNNaker2 is an excellent choice for a pioneering NP mission due to its flexibility, abstraction level, neuron model options, dendritic tree flexibility, and learning rules.
-
The flexible software model used on SpiNNaker2 can provide a substrate for self-healing networks. Failing or failed cores can be compensated for by migrating populations of neurons resident on a core to unused cores elsewhere, provided that the routing to-and-from these cores can also be updated, which is functionality supported by the SpiNNaker architecture. This provides additional layers of stability and reliability for applications in the harsh environment of space.
In summary, the project recommends the use of SpiNNaker for congestion prediction and jamming classification, and VERSAL for interference detection and precoding. Neuromorphic processors may not be suitable for energy-intensive GEO-class missions, but they are the best choice for small CubeSats with limited power resources. SpiNNaker2 is an excellent choice for a pioneering NP mission.
5. Potential Follow-on Activity
As a subsequent step, an in-flight demonstration is suggested to showcase the capabilities of neuromorphic processors. The mission concept for this demonstration involves the utilization of a small CubeSat solution, which offers advantages in terms of efficiency and affordability. The primary objective of the mission is to validate the effectiveness of integrating neuromorphic processors into traditional telecommunication missions focused on connectivity. The satellite will operate in an inclined low Earth orbit (LEO) at an altitude of 600 km, with a minimum mission duration of 1 year and an ideal target of 3 years. The coverage area and specific locations for user stations and the satellite control center will be determined, ensuring they are situated within ESA member states.
The mission’s functional definition includes the baseline functionality of providing point-to-point connectivity between two ground stations with a minimum bandwidth of 200 MHz in each link. A regenerative processor will be implemented to enable full connectivity between input and output channels. The user band proposed for the mission is the S-band, and specific frequency plans will be determined later. In addition to the baseline functionality, the payload will include an AI/ML processing section for enhanced functions such as interference detection, jamming classification, congestion forecasting, and precoding matrix calculation. The mission will be commanded via a TT&C link in S-band, and the payload configuration can be managed through the TT&C link or an in-band channel in the full user bandwidth.
The preliminary target solution for the mission is a 6U CubeSat, utilizing a commercially available CubeSat platform with a specific payload section designed for this mission. A 4U platform will be used to ensure a long lifetime, with a 2U processor module including the radio-frequency front ends. The user antennas for the payload will be mounted on the CubeSat body outside the 2U payload.
Current Status
Finished.
