
PAGE CONTENTS
Objectives
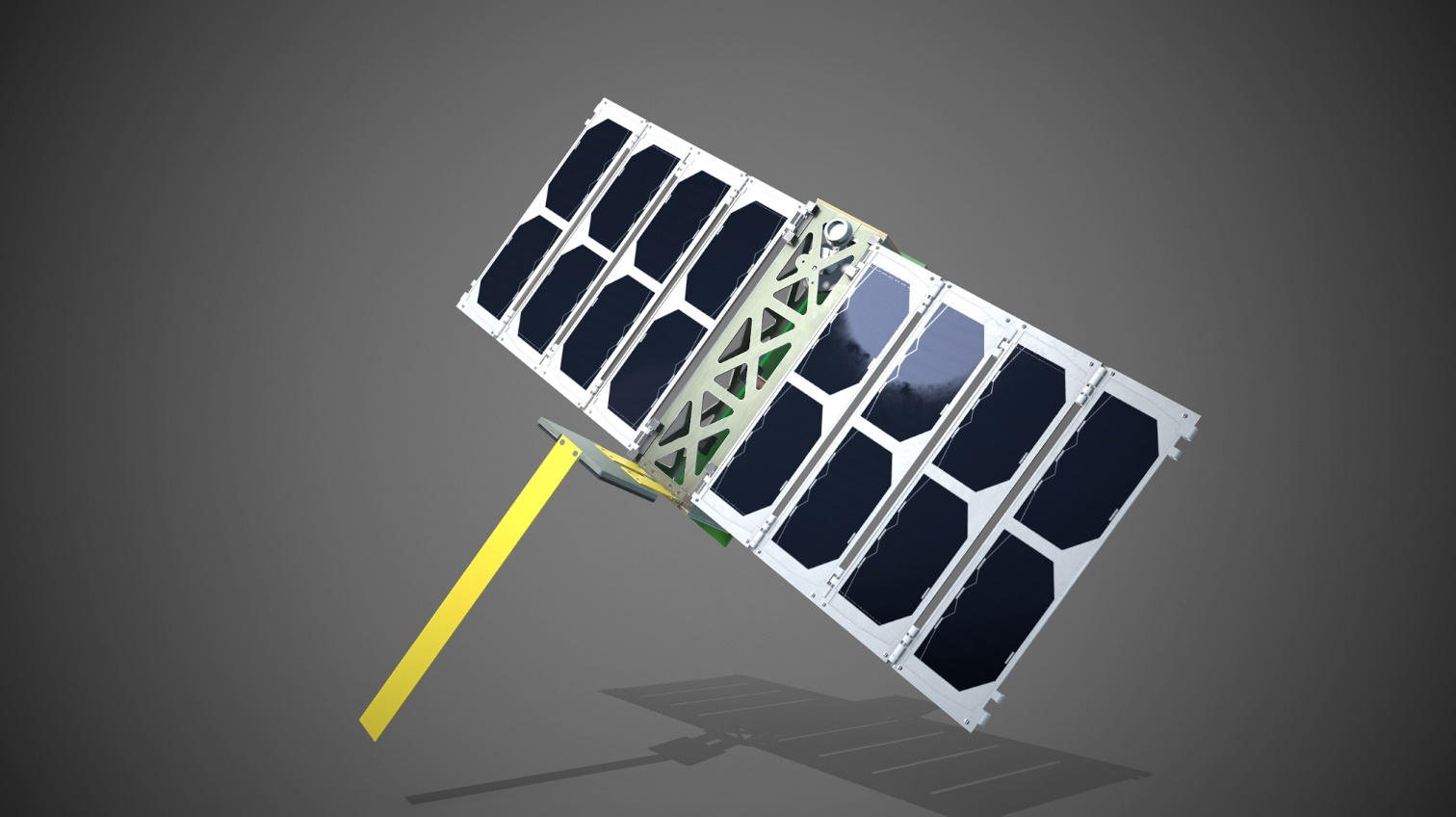
The starting objective of this project was to design, develop and test an advanced 3p (1p = 5cm cube) PocketQube with increased power and active pointing capabilities suitable for the In-Orbit Demonstration/In-Orbit Verification market, as well as a 96p PocketQube Orbital Deployer for batch launches of PocketQubes. An integrated payload also helps to demonstrate the platform’s capability as a commercial turnkey, customisable solution.
Challenges
The primary issues with projects such as this are driven by the small size of the satellite in question. Nanosatellites have begun to address the issues of scale, but the even smaller form factor of picosatellites such as this causes further issues.
Primarily the challenge with a PocketQube is an issue that affects even much larger satellites, i.e. power. This relates to the use of solar panels and batteries to generate and store all the electrical energy needed to operate the satellite, including its subsystems and payload, through the orbit. Decreasing the size of the satellite necessitates either new technologies of power generation/storage, or reduction in both of these requirements.
The second challenge is the reduction in allowable payload, which is limited in both size and mass. To perform similar activities to a larger satellite requires miniaturisation of the payload. Depending on the particular application this can be extremely difficult, as some such as high-power optics can have physical laws as limiting factors in certain aspects.
Related to these issues, there are two key technical challenges that this Technology Phase aims to de-risk. Firstly, thermal control of the platform and subsystems is particularly difficult given the dissipation of the components and their proximity in an extremely small volume. To address this, extensive thermal analysis was used to develop a thermal design which was verified in thermal vacuum tests. Secondly, development of the Attitude Determination and Control System (ADCS) is especially challenging given the size limitation and the fact that the ADCS components had to be designed from scratch – there is no off the shelf ADCS for satellites of this size. Extensive design, analysis and testing was completed in order to de-risk the ADCS subsystem.
System Architecture
Unicorn 2 has a similar architecture to Alba Orbital’s previous product Unicorn-1, though this is modified from a 2p to 3p size. This increase in size allows extra features to be added, such as the parts required for an actively-controlled ADCS.
Plan
The project has 3 milestones (successfully achieved):
PDR, April 2017
Mid-Term Review, April 2018
Final Review, December 2018
Current Status
The Alba Orbital team achieved successful completion of the Final Review in December 2018. The critical de-risking tests are considered complete and the lessons learned will be taken into account in the next version of the products. .