

PAGE CONTENTS
Objectives
The product is part of the spacecraft platform and payload architecture. The combination of dedicated Fuse Boxes and µRTUs has helped reduce harness mass on the Electra Platform by 400 kg by distributing smaller connecting units to be close to the equipment they serve, hereby significantly reducing the length of dedicated cabling. The product can be scaled according to different satellite needs, as it is designed using a modular concept. For the satellite the prime will choose the uRTU module configuration best suited to the specific need.

Challenges
As the primary objective with this project is to reduce overall spacecraft mass, the unit itself is restricted to a rather tight mass budget – especially the amount of functionality taken into consideration.
Also the power dissipation in the unit requires attention, due to its relatively small footprint on the satellite structure.
System Architecture
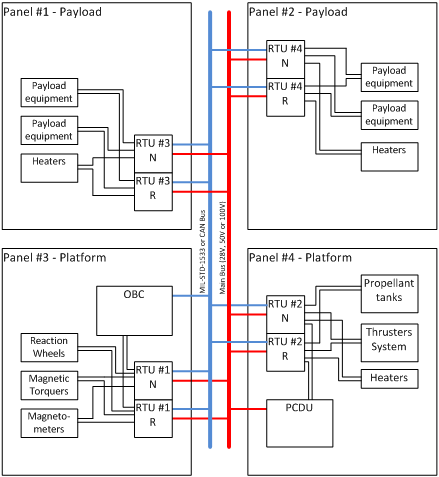
A µRTU is a non-redundant unit with external cross strapping capability; redundancy can therefore easily be obtained by having two µRTUs side by side.
A µRTU may contain just a single Core module, or when additional functionality is needed, the µRTU can be extended by attaching Interface modules to the Core module. The Core Module manages all internal control of the µRTU and act as a master on internal command and telemetry busses, while the Interface modules act as slaves. The interconnection between the µRTU modules are routed via a simple Backplane connector by one-to-one connections.
The µRTU assembly has the backplane mounted flat on the spacecraft panel with the modules plugged in vertically on top of the backplane. To ensure a solid assembly each module is locked to its neighbouring modules. All modules are mechanically identical, which means all modules can be mounted next to any other module.
Plan
Phase1 consists of:
- Kick Off (Sep. 2016)
- PQSR (Jun. 2017)
- PDR (Nov 2017)
- EM phase (Oct. 2017 – Feb. 2018)
- EQM phase (Jan. 2018 – Sep 2020)
Phase 2 consists of:
- CDR (Oct. 2018)
FM phase (May. 2020 – Nov. 2021) (Not within scope of this ARTES project)
Current Status
The design phase has been completed. EQSR, PDR, CDR is completed.
EM and EQM units have been delivered. In the frame of other projects RTU FM units have been delivered – the design is quite mature.